Tactile sensing is a crucial sensory modality employed by humans during object manipulation and grasping, enabling them to discern various object characteristics such as stiffness, weight, and surface roughness. In the context of robotic systems, integrating slip detection through tactile sensing can significantly enhance the robot’s ability to maintain a secure grasp during operations with varying system dynamics. Our study identified critical slip detection parameters and develop a real-time slip detection system that triggers prompt interventions to prevent slip.
Tactile Measurement
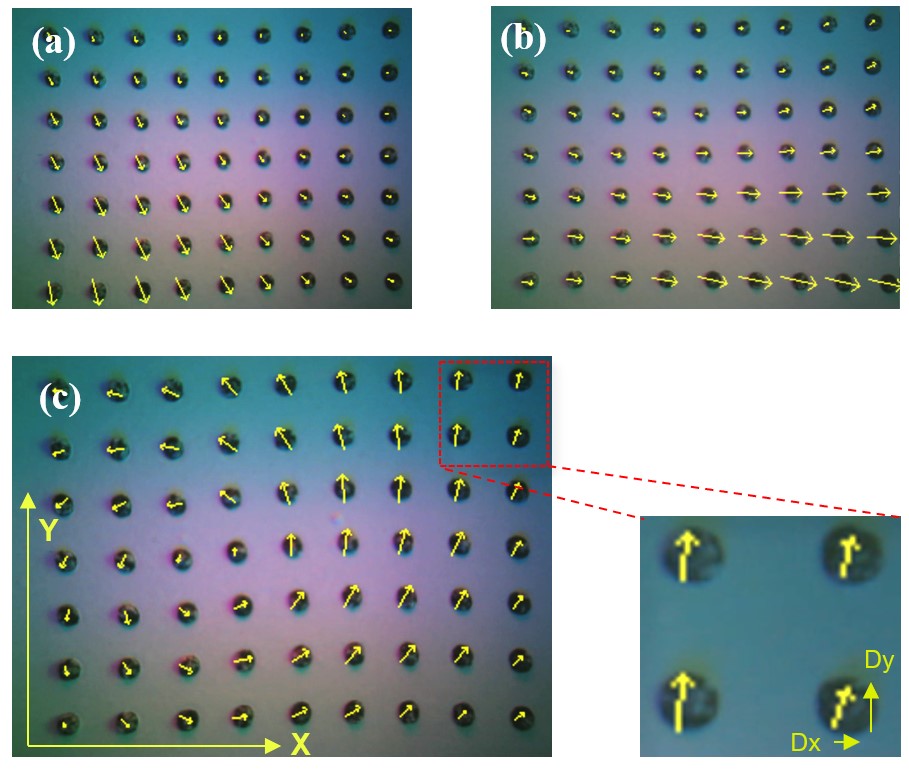
The displacement of individual markers overlaid on the tactile image, providing an estimation of the shear force field.
Slip Detection
Our work leverages the inhomogeneity of tactile sensor readings during slip events to develop distinctive features and formulates slip detection as a classification problem. To evaluate our approach, we test multiple data-driven models on 10 common objects under different loading conditions, textures, and materials. Our results show that the best classification algorithm achieves an average accuracy of 99%.
Slip may happen during a manipulation task
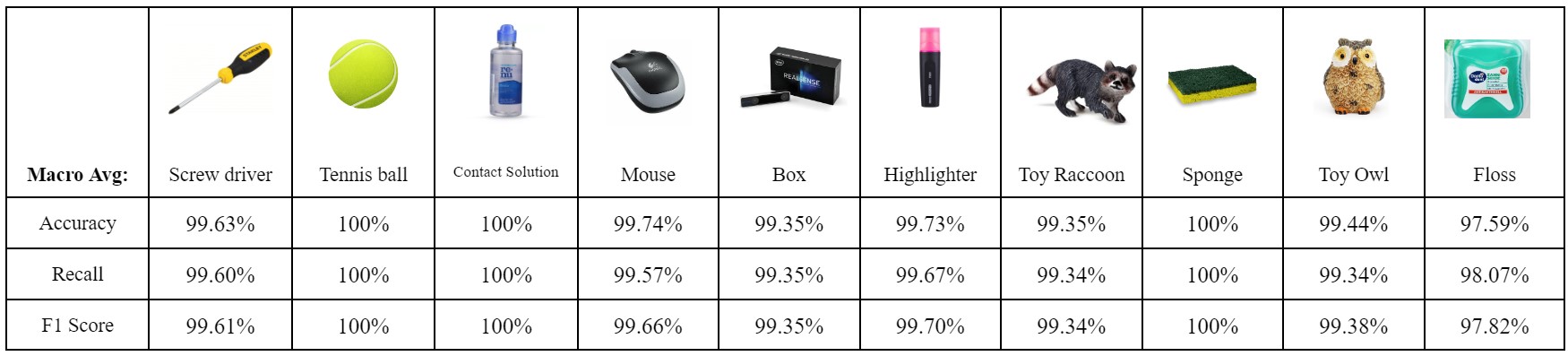 Performance of the developed slip detection for objects with different materials and surface characteristics
Performance of the developed slip detection for objects with different materials and surface characteristics
Dynamically Prevent Slip in a Book Stowing Task
We demonstrate the application of this work in a dynamic robotic manipulation task in which real-time slip detection and prevention algorithm is implemented
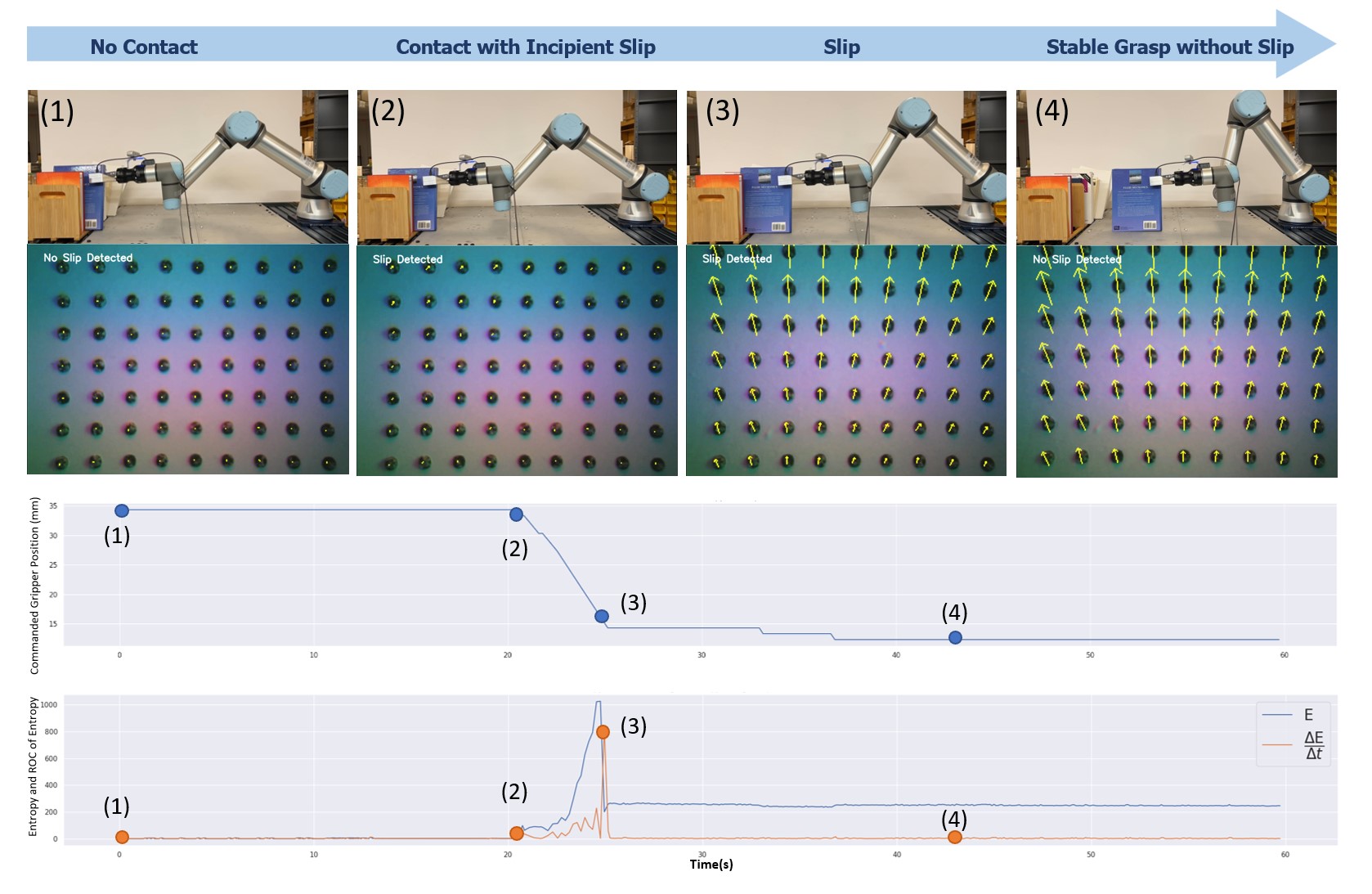
A demonstration of sliding a book out of a shelf is presented, consisting of multiple stages of grasping. The initial row of images portrays the progressive grasping stages, commencing from (1) static initial grasp, advancing towards (2) an incipient slip at the start of manipulation, further to (3) an actual slip, and culminating at (4) a stable grasp. The subsequent row exhibits the data obtained from a tactile sensor and the corresponding real-time detection of slip. The third row displays the command gripper distance to forestall slippage, whereas the fourth row depicts the entropy and the rate of its alteration throughout the grasping procedure.

This work was supported by a UW+Amazon Science Hub Gift-funded Robotic Research Project. For more info, please check our paper https://arxiv.org/abs/2303.00935