3D Defect Detection for Industrial Automation
We develop state-of-the art approaches for detecting defects in manufactured parts via analysis of their 3D shapes
3D Defect Detection for Industrial Automation
Robotic quality inspection is rapidly advancing as a frontier in intelligent manufacturing, where robots extend beyond human limitations in consistency, endurance, and access to challenging environments. A detector, such as a high-resolution 3D scanner, is mounted on the robotic arm, which then maneuvers it to capture the surface geometry of the inspected part. The collected data is analyzed to identify and localize defects.
Much of the current research focuses on detecting defects from high-resolution 2D images. However, defects in industrial parts often manifest as geometric deviations — deformations, missing or extra structures — rather than texture changes. With that in mind, we leverage modern AI to develop efficient, accurate methods for 3D defect detection.
We cast 3D defect detection as a contrastive learning problem. Each part’s surface is split into local patches, and a deep feature extractor is trained to pull together the representations of geometrically identical patches while pushing apart those of anomalous ones. To make the most of the sparse anomaly annotations available in standard benchmarks, we formulate training as a semi-supervised problem with two complementary objectives: a strong objective contrasts real anomalies with their defect-free counterparts, and a weak objective trains on patches that span a far wider range of geometries. The multi-objective formulation sharpens detection of subtle defects while improving generalization to unseen shapes.
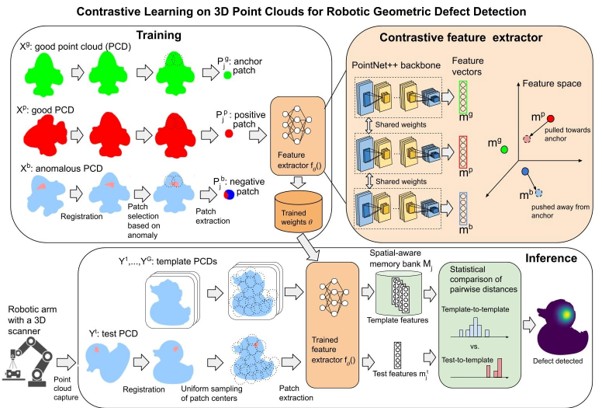
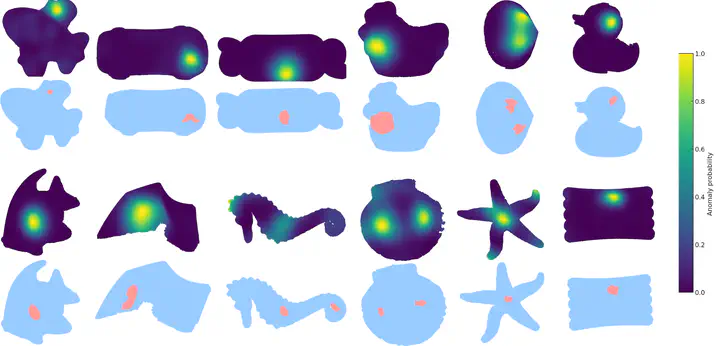
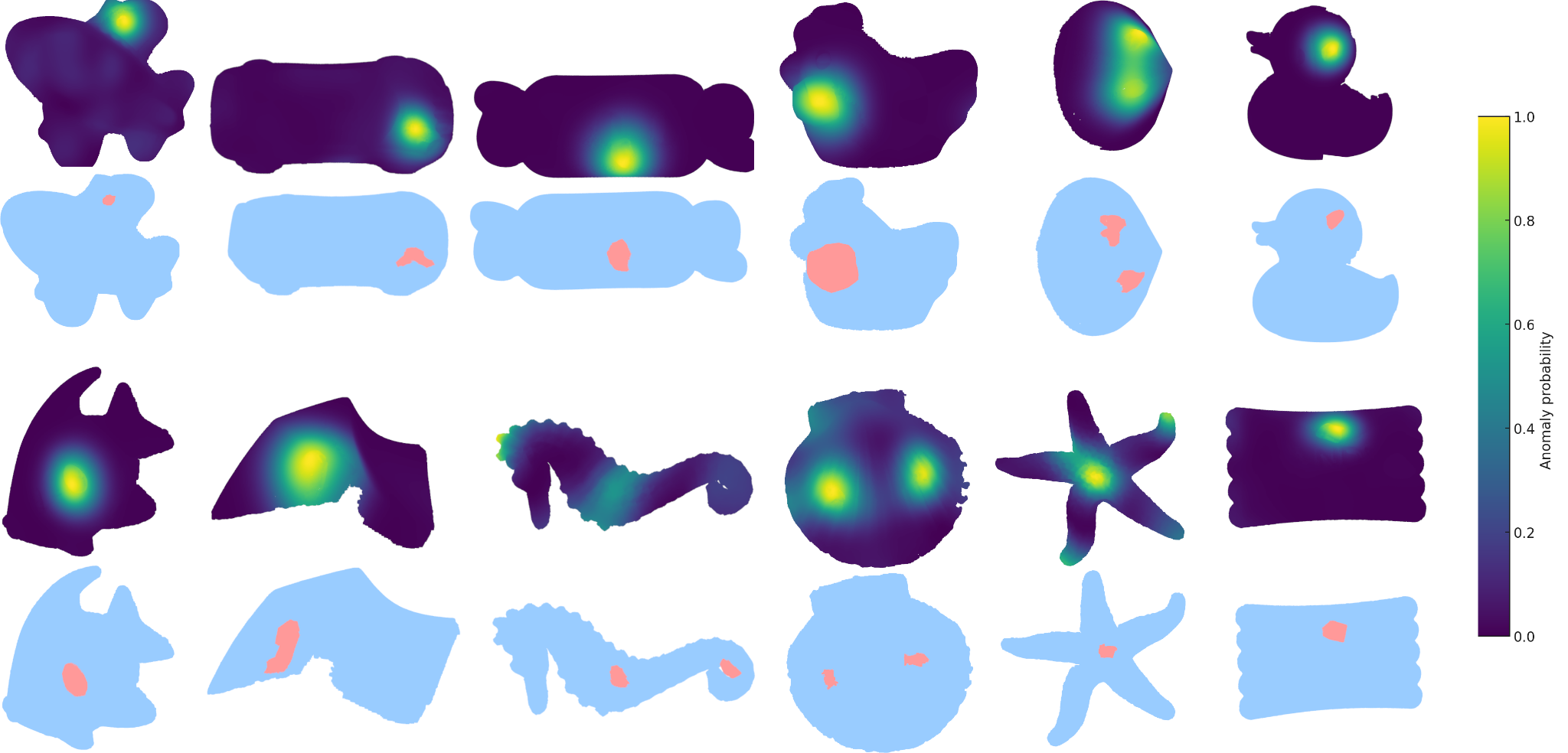
At inference time, a test part is compared against several defect-free reference parts, all registered into a common coordinate frame. Instead of storing the representation of every reference patch in a single global memory bank, we keep many location-specific banks, so that a test patch is compared only against reference patches from the same location. This spatially aware comparison removes the spatial ambiguity that would otherwise cause defects to be missed — cases where an otherwise valid part feature, such as a screw hole, appears in the wrong place. A per-patch anomaly score, based on statistical effect size, accounts for the inherent geometric variability arising from measurement noise and manufacturing tolerances.
The method is lightweight enough to train on a single consumer GPU, yet sets a new state of the art: on Real3D-AD it reaches a mean object-level AUROC of 91.2% (compared to 82.9% for the strongest prior method) and a point-level AUROC of 95.0%, and on Anomaly-ShapeNet it reaches an object-level AUROC of 94.9%.
We are now extending the location-aware comparison into a deep learning-based module that jointly reasons over patch features, their spatial arrangement, and registration uncertainty.
Related publications
A. Tarvo, Y. Wan, and X. Chen. Contrastive Learning on 3D Point Clouds for Robotic Geometric Defect Detection. IEEE International Conference on Robotics and Automation (ICRA), Vienna, Austria, 2026.
A. Tarvo, Y. Wan, and X. Chen. The Good, the Bad, and the Template: Contrastive Anomaly Detection in 3D. IEEE International Conference on Pattern Recognition (ICPR), Lyon, France, 2026.