Robust Signal Recovery of Structured Beyond Nyquist Frequency Signals Using Finite and Infinite Impulse Response Filter Designs
Abstract
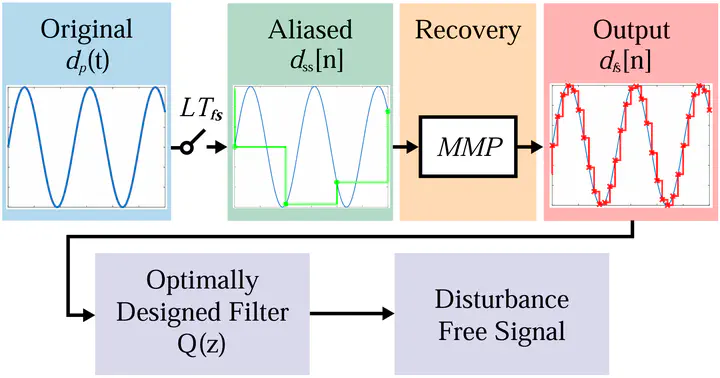
Feedback control becomes fundamentally challenging when disturbances approach or exceed the sensor’s Nyquist frequency. We propose an information recovery method that reconstructs structured, aliased signals far beyond such Nyquist limitations using slowly sampled measurement data. This is achieved by a unique synergy of a multirate model predictor (MMP), the internal model principle, multirate digital signal processing, along with finite impulse response (FIR) and infinite impulse response (IIR) designs. The effectiveness of the algorithm is validated through both numerical analysis and experimentation on a physical motor control hardware.
Type
Publication
ASME Letters in Dynamic Systems and Control