Optimal Loop Shaping and Disturbance Rejection Beyond the Nyquist Frequency using a Forward Model Disturbance Observer and Convex Optimization Based Filter Design
Abstract
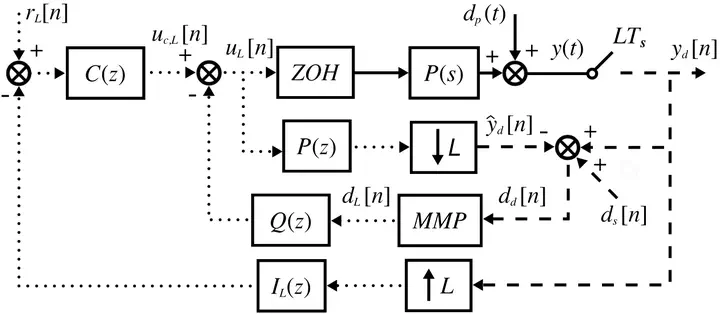
Loop shaping based on the disturbance observer (DOB) offers great flexibility in designing a control system’s closed-loop sensitivity to external disturbances and noises. While it is well understood how to design feedback control to reject band-limited disturbances with little trade-off when a closed-loop system has a single sampling control rate, challenges arise when disturbances appear beyond the Nyquist frequency and when the speed of the feedback sensor cannot be conveniently increased due to hardware and/or process constraints. Such is the case in hard disk drives and emerging visionbased motion control. In this paper, we propose an optimal multirate forward model disturbance observer (MFMDOB) for intuitive, flexible, and exact rejection of band-limited disturbances beyond the Nyquist frequency. Based on the tools from Youla-Kucera parameterization, the internal model principle, multirate analysis, and convex optimization, we translate the design objective into a set of model-based convex optimization and multirate prediction problems, enabling optimal local-loop shaping (LLS). We provide different optimal design formulations with finite and infinite impulse response filters. Verification of the MFMDOB is conducted on a galvo scanning process model in selective laser sintering for additive manufacturing.