Contrastive Learning on 3D Point Clouds for Robotic Geometric Defect Detection
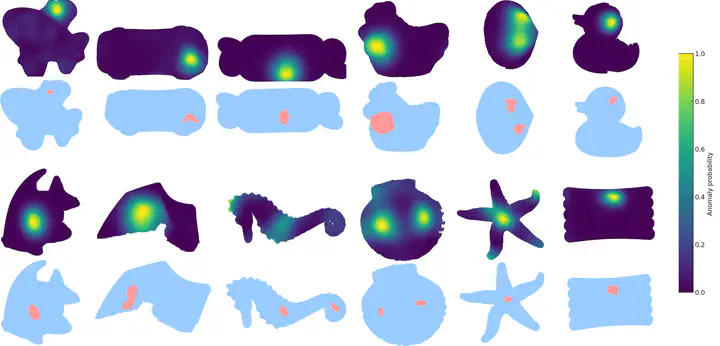 Anomaly localization by COSARAD on Real3D-AD.
Anomaly localization by COSARAD on Real3D-AD.Abstract
Robotic quality inspection is emerging as a key enabler in intelligent manufacturing, allowing robots to transcend human limitations in endurance, consistency, and access to complex structures. Most existing approaches emphasize 2D image-based surface defect detection, yet they often overlook geometric defects, which are more prevalent and challenging in industrial inspection. We formulate geometric defect detection as anomaly detection in 3D point clouds and propose COSARAD, a framework that integrates contrastive learning with spatially aware comparisons of local geometries. On the Real3D-AD benchmark, our method reaches a mean object-level AUROC of 0.901, establishing a new state of the art.
Type
Publication
IEEE International Conference on Robotics and Automation (ICRA)